.

แปลและเรียบเรียง : ณัฐพนธ์ จงฤกษ์มงคล
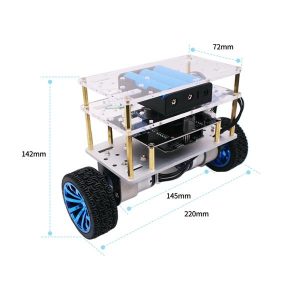
หุ่นยนต์รักษาสมดุลย์ด้วยตัวเอง (Self Balance robot) ที่มีความแข็งแรงและทนทาน ซึ่งปรับแต่งโปรแกรมให้รักษาสมดุลย์ได้ดียิ่งขึ้น และใช้บอร์ดประมวลผล Arduino UNO ตัวหุ่นยนต์จะประกอบด้วยแผ่นรับบอร์ดควบคุมและเป็นโครงสร้าง 3 ชั้น สามารถรับน้ำหนักได้ 2 กิโลกรัม ตัวโมดูลต่อร่วมใช้งานออกแบบให้ดูเรียบง่ายเหมาะสำหรับผู้เริ่มต้นเรียนรู้หุ่นยนต์รักษาสมดุลย์ ตัวบอร์ด Arduino UNO ออกแบบให้ง่ายสำหรับการพัฒนาในรูปแบบต่างๆ ผู้ใช้สามารถควบคุมตัวหุ่นยนต์ผ่านแอพพลิเคชั่นแอนดรอยด์ด้วยการเชื่อมต่อผ่านบลูธูท ซึ่งสามารถนำไปใช้งานในการแข่งขันทั่วไปหรือสำหรับโครงงานงานวิจัยที่เน้นการศึกษาเรียนรู้ในระดับที่สูงขึ้น.

คุณสมบัติการทำงานของตัวหุ่นยนต์
- หุ่นยนต์ที่สามารถควบคุมการทำงานได้ทันทีซึ่งทำงานแบบเวลาจริงและมีการปรับเปลี่ยนระบบการทำงานทันที ซึ่งผู้ใช้สามารถเรียนรู้และเล่นได้ทุกที่
- ล้อของตัวหุ่นยนต์กันลื่นเพื่อให้สามารถทรงตัวได้ดี, ตัวถังเป็นอลูมิเนียม, ใช้มอเตอร์กำลังขับสูง, ให้ความแม่นยำในการเคลื่อนที่สูงด้วยฮอร์เซนเซอร์ตรวจจับการหมุนมอเตอร์
- ใช้บอร์ดรวมวงจรต่างๆ เข้าด้วยกันให้มีความกระทัดรัด และเชื่อมต่อระหว่างบอร์ดด้วยปลั๊กเป็นลักษณะของโมดูล ซึ่งการออกแบบจะให้เชื่อมต่อร่วมกับกับโมดูลหลัก เช่นการเปลี่ยนวิธีการควบคุมหุ่นยนต์ด้วยสวิตช์ ในเรื่องแรงโน้มถ่วงและข้อมูล การดูชุดข้อมูลที่เกิดขึ้นและการตรวจสอบการทำงานของโปรแกรมควบคุม (PID parameters) ที่เกิดขึ้นโดยตรง การแสดงผลลักษณะสัญญาณการเร่ง การปรับเอียงและค่าแรงดันที่เกิดขึ้นจากการจำลอง
- ตัวหุ่นยนต์สามารถควบคุมผ่านแอพพลิเคชั่น ด้วยการเชื่อมต่อผ่านบูลธูทบนโทรศัพท์มือถือในระบบปฏิบัติการแอนดรอยด์ ตัวแอพพลิเคชั่นรองรับการทำงานหลายคำสั่ง
- โปรแกรมควบคุมการทำงานตัวหุ่นยนต์ใช้งานฟรี (Angle fusion and balance algorithm) ซึ่งหลังจากเราตรวจสอบความถูกต้องการทำงานของโปรแกรมแล้ว จะสามารถควบคุมตัวหุ่นยนต์การทำงานและใช้งานได้เป็นปกติ
- ตัวหุ่นยนต์สามารถควบคุมด้วยสวิตช์ให้ทำงานแบบอัตโนมัติโดยการจดจำท่าทางและการเคลื่อนที่

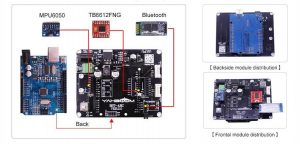
โครงสร้างของบอร์ดควบคุมและอุปกรณ์เซนเซอร์ตัวหุ่นยนต์
สำหรับบอร์ดควบคุมการทำงานของตัวหุ่นยนต์ จะเป็นลักษณะของโมดูลที่สามารถประกอบเข้าด้วยกันคือ 1. ส่วนของตัวบอร์ดหลักในการนำส่วนของโมต่างเข้ามาประกอบ 2. บอร์ดประมวลผล Arduino UNO 3. บอร์ดเซนเซอร์ความเร็วและความเร่งและไจโรสโคป 4. โมดูลเชื่อมต่อไร้สายด้วยบลูธูทกับโทรศัพท์มือถือ เป็นต้น โดยในส่วนของวงจรขับตัวมอเตอร์จะถูกออกแบบให้อยู่บนตัวบอร์ดหลักไว้เรียบร้อยแล้วที่สามารถเชื่อมต่อสำหรับใช้งานได้ทันที
การควบคุมตัวหุ่นยนต์ Yahboom RTR self balance
การควบคุมตัวหุ่นยนต์สามารถควบคุมได้ทั้งบนโทรศัพท์มือถือผ่านแอพพลิเคชั่นและคอมพิวเตอร์ตั้งโต๊ะ ผ่านการเชื่อมต่อแบบไรสายด้วยบูลทูธ (Bluetooth) โดยผู้ใช้สามารถปรับแต่งค่าสำหรับการควบคุมหุ่นยนต์ได้ไปยังโปรแกรมคำสั่งการทำงานในการประมวลผล (PID Control) รวมทั้งสามารถดูข้อมูลการทำงานของตัวหุ่นยนต์ต่างๆ เพื่อนำมาวิเคราะห์การทำงานที่เกิดขึ้นประกอบในการปรับแต่งการใช้งานหรือสำหรับการเรียนรู้ระบบการควบคุมแบบปิด (Close loop control)



อุปกรณ์ต่างๆ ในชุดประกอบหุ่นยนต์ Yahboom RTR self balance

- บอร์ดประมวลผล Arduino UNO 1 บอร์ด
- อะแดปเตอร์ชาร์จเจอร์ 1 ตัว
- คู่มือการใช้งานหุ่นยนต์ 1 ฉบับ
- เซลล์แบตเตอรี่ชนิดลิเทียม (Lithium) ขนาด 18650 จำนวน 3 ก้อน
- สายเชื่อมต่อกับคอมพิวเตอร์แบบ USB Type 1 เส้น
การรู้จำตำแหน่งการทรงตัวของหุ่นยนต์ Yahboom RTR self balance
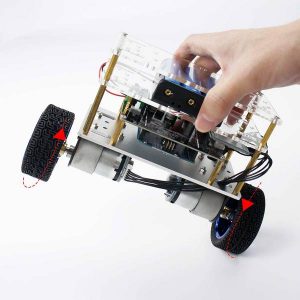
สำหรับการรู้จำตำแหน่งการทรงตัวของหุ่นยนต์นี้จะทำได้โดยการวางตัวหุ่นยนต์บนพื้นเรียบ โปรแกรมการทำงานในตัวหุ่นยนต์จะจดจำการทรงตัวโดยอัตโนมัติเพื่อนำไปปรับให้เกิดความสมดุลย์ที่เหมาะสม รวมทั้งการปรับการทรงตัวในแนวดิ่งตัวหุ่นยนต์เพื่อการเคลื่อนที่ไปด้านหน้า โดยการอ่านค่าจากเซนเซอร์ การใช้โปรแกรมรู้จำการเคลื่อนที่และระบบการปรับความสมดุลย์แบบอัตโนมัติในตัวเอง

รูปข้างบน (ด้านซ้ายมือ) เป็นการปรับแต่งตัวหุ่นยนต์อยู่บนพื้นที่เรียบ เมื่อไปเสร็จแล้วตัวหุ่นยนต์จดจำเพื่อการทรงตัวโดยอัตโนมัติและรูปด้านขวามมือจะเป็นการทดสอบการทำงานของเซนเซอร์ ซึ่งจะทำให้โปรแกรมจะรู้จำการทดสอบ รวมทั้งหยุดการทำงานของระบบเมื่อพบความผิดปกติที่เกิดขึ้นกับตัวหุ่นยนต์
ข้อมูลที่เกี่ยวข้องเพิ่มเติมสำหรับหุ่นยนต์ Yahboom RTR self balance

สำหรับข้อมูลที่เกี่ยวข้องกับตัวหุ่นยนต์ Yahboom RTR self balance สามารถดาวน์ดหลดได้ที่ http://www.yahboom.net/study/bc-uno ซึ่งจะประกอบด้วยการแนะนำการใช้งานเบื้องต้น โปรแกรมใช้งานร่วมกับตัวหุ่นยนต์ทั้งในส่วนของการพัฒนาตัวหุ่นยนต์และโปรแกรมสำหรับควบคุม คู่มือการใช้งาน รวมทั้งผังวงจรสำหรับตัวหุ่นยนต์อีกด้วย
ข้อมูลโดย : https://category.yahboom.net/products/balancecar
.
ติดต่อสอบถามข้อมูลเพิ่มเติมได้ที่
บริษัท ซีเอ็ดยูเคชั่น จำกัด (มหาชน) 1858/87-90 ถนนเทพรัตน แขวงบางนาใต้ เขตบางนา กรุงเทพมหานคร 10260
โทรศัพท์ 0 2826 8263 โทรสาร 0 2826 8356-59 อีเมล์ stem@se-ed.com
.